Etymology of the word ‘Robot’
You will never get bored when you ponder on something which you like the most. Am I right? Yes, now we are going back to history without the help of time machine to find out how the word Robot came into existence. In the ancient period, robots were playing a vital role only in science fiction stories. In 1817, Mark Shelley, a novel writer, wrote a story named ‘Frankenstein’ in which there was a character looking like a humanoid monster. There are many instances similar to it where robots were used in stories without using the name Robot. In the year 1920, Robot gets its name for the first time from a Czechoslovakian drama director Karel Capek. Are you excited to know how it happened? Karel Capek had a machine man character in his film and he was not interested to name it as others did. So, he decided to give it a new name and started to search the dictionary of his own language ‘Czech.’ He found a word called “Robota” which means slave or forced labour. He strikes out the final letter ‘a’ from ‘Robota’ and coins the word ‘Robot’ for his machine man characters. Later, he named his drama as Rossum’s Universal Robots (R.U.R). A pic from the drama ‘Rossum’s Universal Robots’ Somehow the name ‘Robot’ started to spread and gets into the movies for the first time in 1927. In this movie, Maschinenmensch Gyroid Humanoid Robots were used, and it created a huge impact for the name. Apart from all these instances, the word ‘Robot’ became more popular after Isaac Asimov, a science-fiction writer, illustrated the Three Laws of Robotics in his story on 1942. Isaac Asimov Robots were dominating in science fiction stories and movies only till 1950, and it was a dream for many scientists to bring robot live to this earth. It actually happened and introduction of robots in the various fields has turned the world to a modern era.
How DTMF works?
DTMF (Dual Tone Multiple Frequency) is a bit sound generated when we touch any one of the telephone key. This sound arises with the combination of two separate frequencies merge together at the same time to produce a unique tone and it is mainly used in TELECOMMUNICATION. The two sinusoidal signals of frequencies (Analog DTMF telephone signal) is a combination of low and high frequencies. There are totally 16 pairs of dual tone multiple frequencies arranged in a 4*4 matrix (refer the below table so you can easily grasp and understand the combination of different frequencies) DTMF is one of the best signaling method between the telephones and switching centers, so this make much easier to control a robot through an interface from a very far distance.Each and every digit represented in the above table has two distinct LOW and HIGH frequency components. These components uniquely represent the respective telephone keypad number or symbol. How can we use DTMF to control a robot? Well, the DTMF was designed in a manner of sending the codes using microphone. Here we clearly pointed out so kind of frequency component codes has been transmitted from micro phones. So to convert these codes to digital ‘0’s and ‘1’s we need an interface and here we are using CM8870 as interface. The interfacing technique of DTMF and CM8870 will be continued on the next article.
Black Line Following Robot without Microcontroller
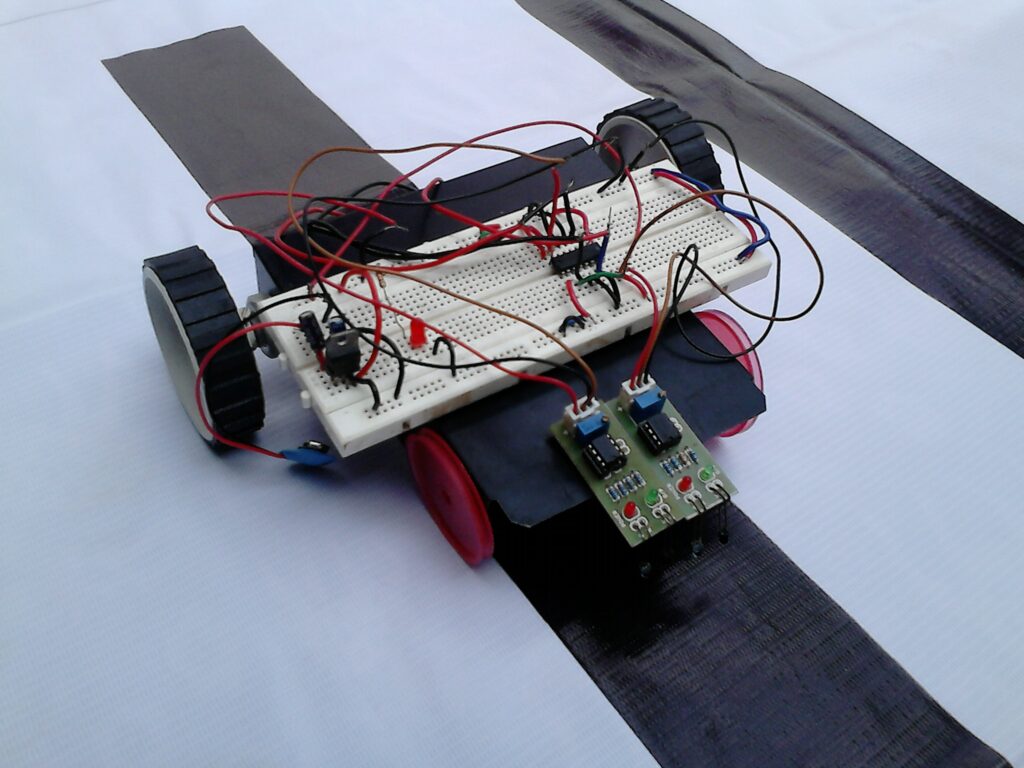
Hi all, Welcome to Jay Robotics Club, Research team. We feel immense pleasure in introducing ourselves, in this very article we shall see about how to build a simple line following robots using very simple IC’s. Before you could start, I will list out the components required.